Proiectul “Localizare inteligentă la interior şi cartografiere utilizând o platformă robotizată – LOMAR” urmareste sa utilizeze, în cadrul unei colaborări între mediul academic şi industrial, cunoştiinţele inovative generate în activităţile de cercetare fundamentală pentru a dezvolta solutii tehnologice viabile precum si servicii si produse inovative. Activitatea proiectului se axeaza asupra dezvoltarii metodelor robuste de localizare in interior, un domeniu activ care vizeaza o gama larga de servicii si aplicatii incepand de la localizarea produselor pe rafturile magazinelor pana la navigarea prin spatii extinse precum centre comerciale, spitale, sedii corporate.
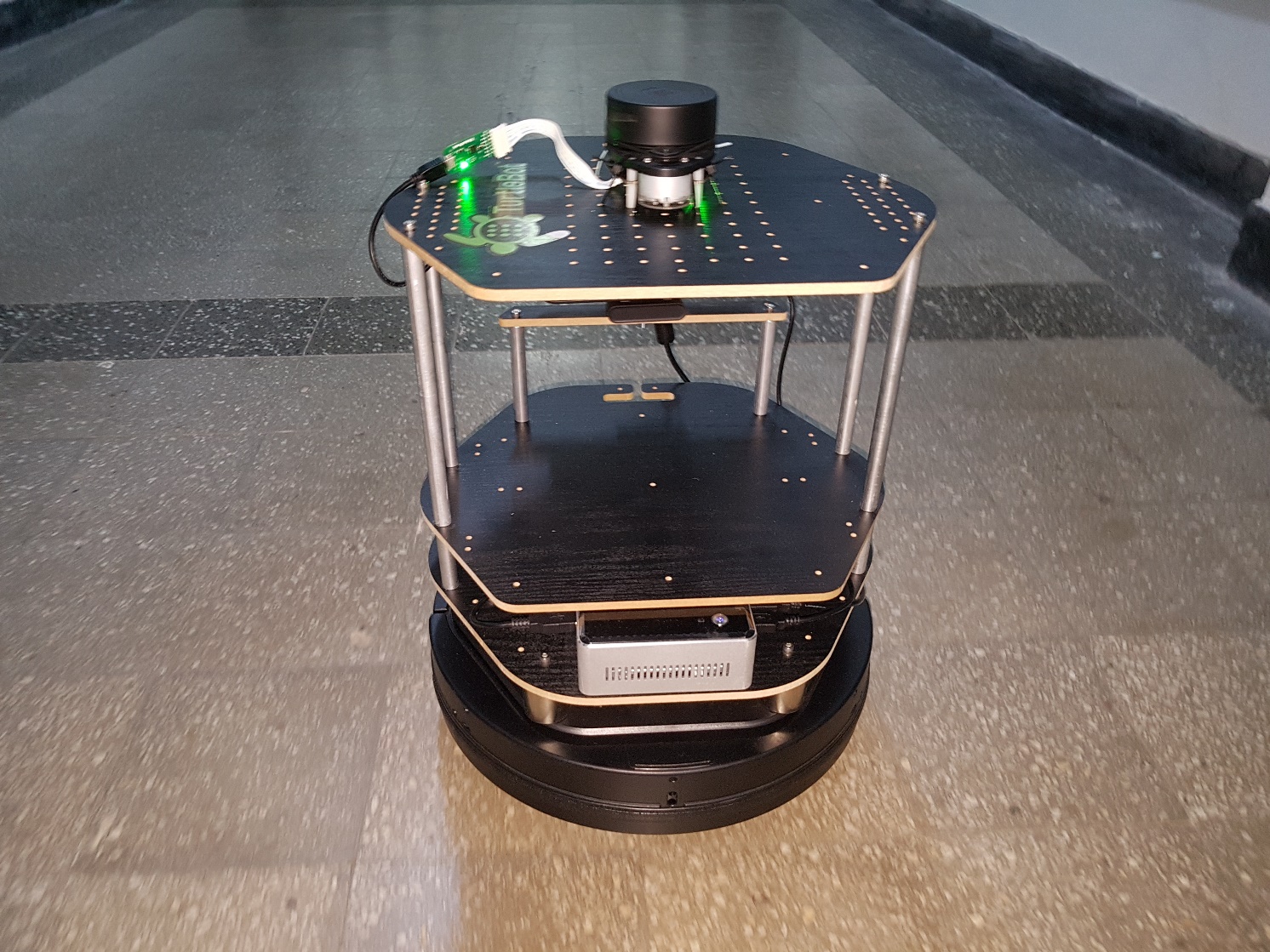
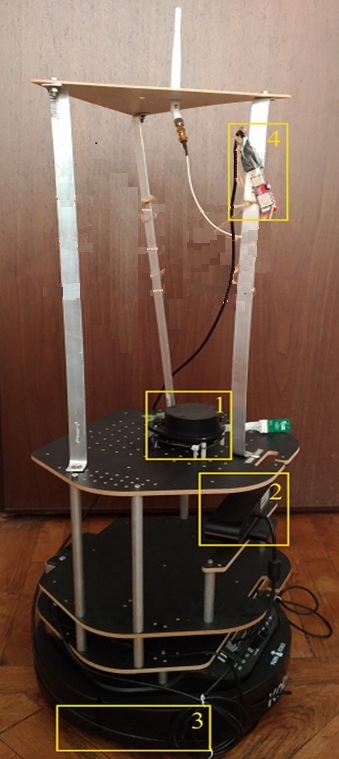
Metoda de localizare adopatata in LOMAR este acea de fingerprint matching. Se porneste de la un concept la nivel de TRL2 sustinut de publicatiile membrilor consortiului in domeniul algoritmilor inteligenti si localizarii pe baza de fingerprints. Se urmareste dezvoltarea de noi algoritmi si introducerea de elemente inovatoare in vederea depasirii problemelor provenite ca urmare a necesitatii colectarii de date pentru calibrare precum si a sensitivitatii metodei la schimbarile din mediu. In acest context, se propune introducerea unei plaforme mobile robotice in pentru achizitionarea continua a semnalelor Wi-Fi concomitent cu stablirea valorii absolute a pozitiei. Etapele finale de testare si demonstrare a elementelor dezvoltate in cadrul LOMAR vor demonstra viabilitatea metodologiei la nivelul tinta de TRL3. Se vor identifica in acelasi timp obstacolele catre atingerea unui nivel tehnologic superior.
Se urmăreşte asigurarea de soluţii viabile precum şi crearea de noi produse şi servicii. Rezultatele proiectului vor fi exploatate prin:
- transferul tehnologic către firma implicată,
- contact direct cu mediul industrial loca,
- diseminarea către comunităţile ştiinţifice (articole ştiinţifice, monografii, conferinţe, târguri, expoziţii),
- diseminarea prin mass-media spre comunităţi neştiinţifice.