The “Intelligent indoor localization and mapping based on a robotic platform – LOMAR” project aims at fostering, through academic-industry collaboration, innovation in basic research that has the potential to produce viable technological solutions as well as novel products and services. The focus is on developing a robust method for indoor localization as the enabler of a wide range of applications, starting from finding a desired item on a supermarket shelf to navigating through large buildings such as shopping center, hospitals, corporate headquarters, etc.
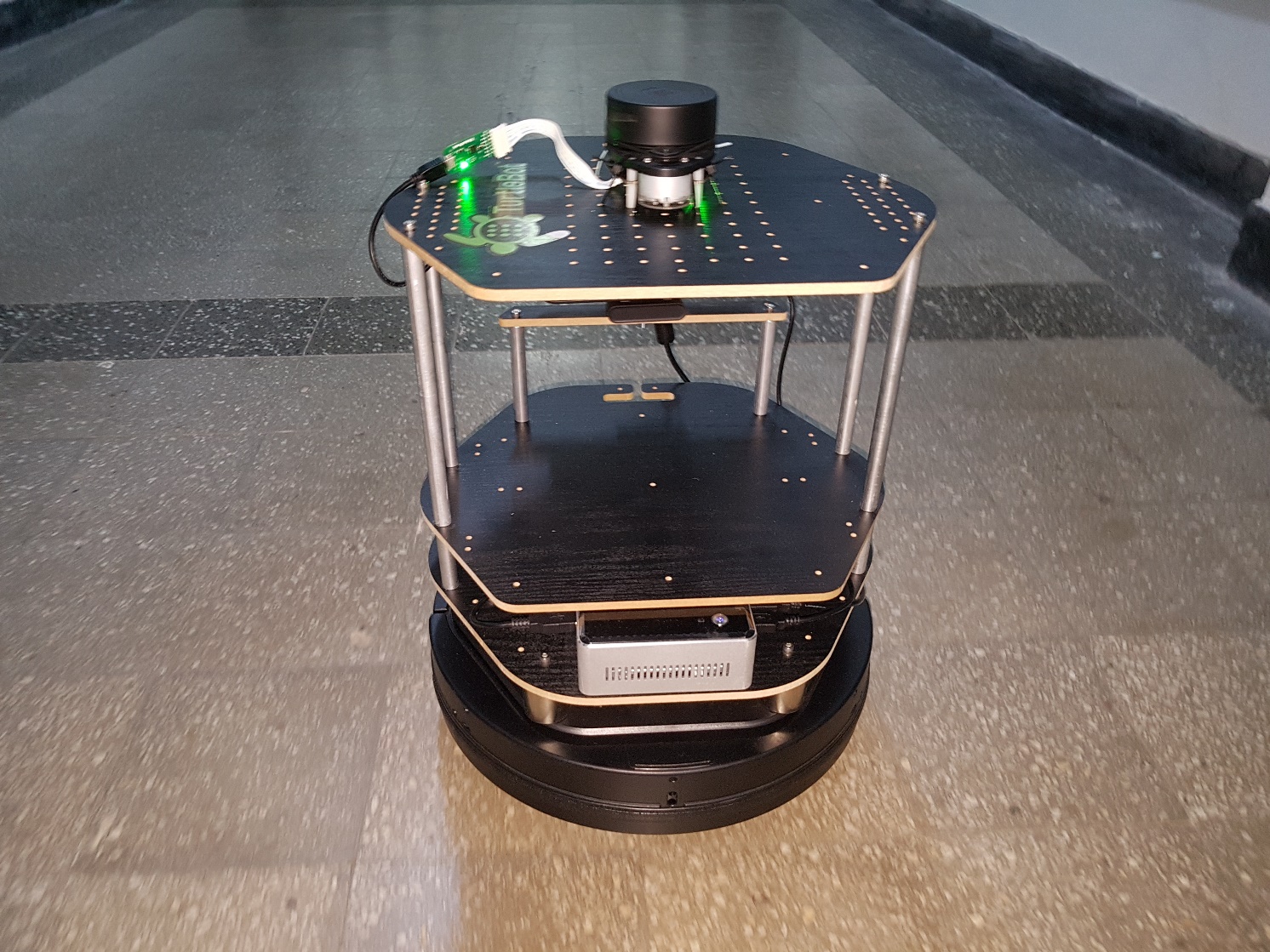
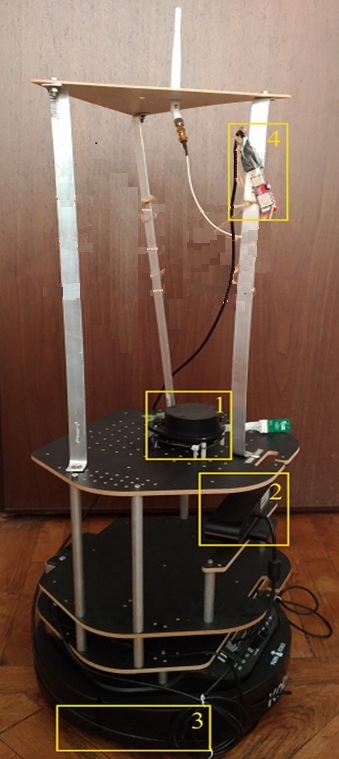
In LOMAR the indoor localization approach adopts fingerprint matching as the basic scheme of location determination. We will start from a concept at Technology Readiness Level (TRL) 2 proven through previous publications of the consortium members on fingerprinting localization methods based on intelligent algorithms. Further development of intelligent algorithms as well as novel elements introduced within LOMAR are designed to overcome known drawbacks and limitations related to data acquisition and method sensitivity. This comprises data acquisition by a self-localizing autonomous mobile robot that is able to continuously record Wi-Fi signals along with the ground truth position. Final testing and demonstration of all the elements developed within the project will provide a proof of concept for the methodology at laboratory scale and will identify up-scaling issues from the reached TRL3 towards small-scale prototypes.
The project results will be exploited through:
- technological transfer towards the involved SME,
- direct contact to industry, starting with local stakeholders and other SMEs,
- high impact dissemination inside the scientific community (scientific articles, monographs, conferences, fairs, exhibitions),
- dissemination through mass-media towards the non-scientific communities.